

了解什么是激光雷达(LiDAR)点云数据
发布日期:2020-10-09
阅读量:14287
收藏:

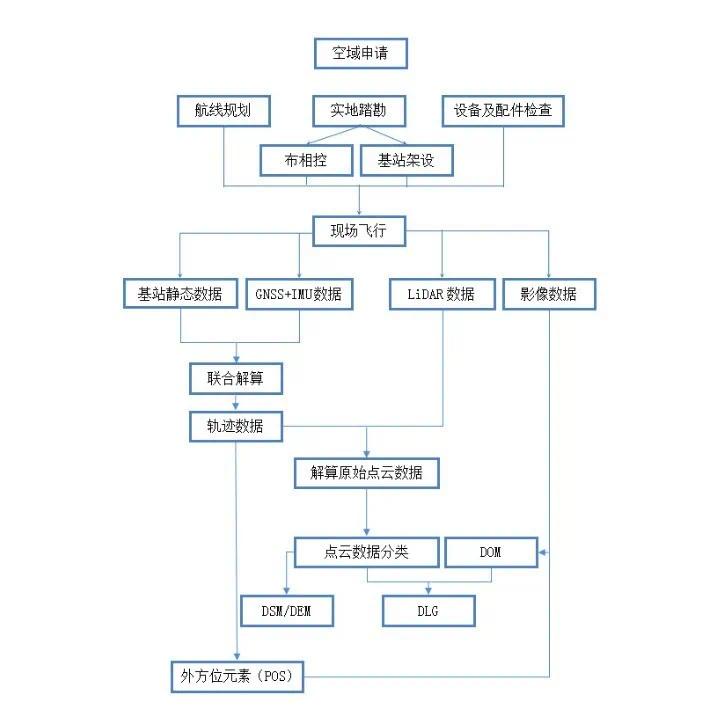
▲点云数据获取及解算过程
1
可用于制作数字高程模型
通过对点云数据进行自动化预处理,地面滤波,结合人工编辑对激光点云进行进一步的精分类,保留地面点,剩余的地面点通过构建不规则三角网(TIN)等模型进行栅格化,可得到高精度的数字高程模型(DEM)数据,也可以转换为等高线数据。
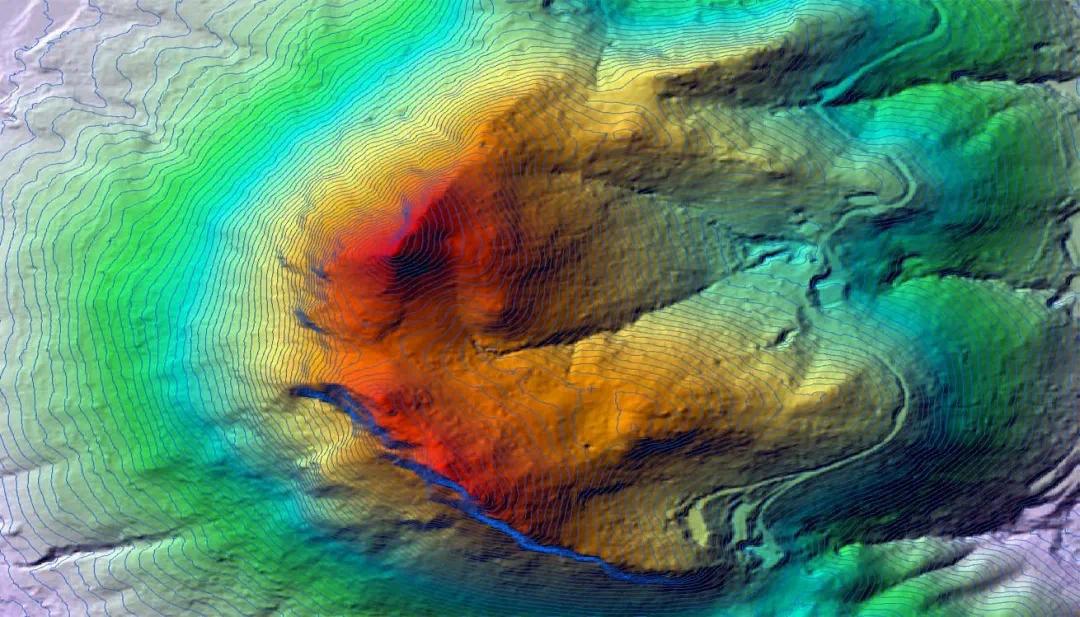
▲数字高程模型及等高线

2
可用于三维建模
随着激光雷达技术的逐步成熟,三维激光雷达技术制作的三维模型精度高,适用范围广,外业工作量少,省时省力。在建筑物的房屋轮廓提取、特征点检测和三维重建工作上发挥了重要作用。且结合倾斜摄影技术,地物提取更加便捷,数据可视化程度更高。
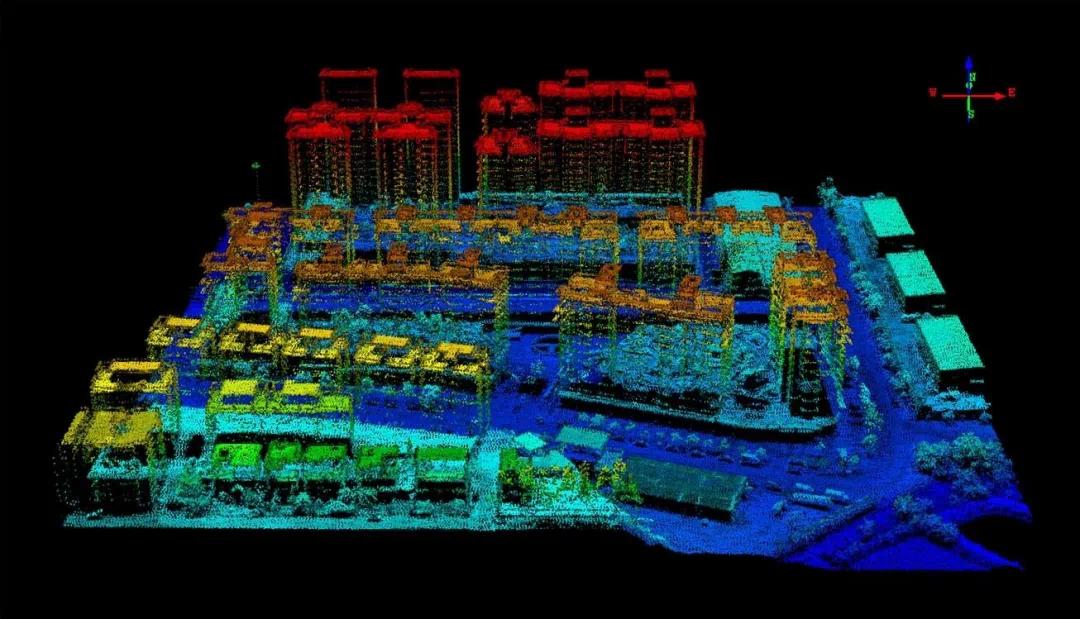
▲点云三维模型
3
可用于农林普查
机载激光点云可以用于普查林木的特征,例如树木的平均高度,树冠密度,生物量,林木储量和植被覆盖度。如果搭配高光谱成像仪,可以确定更多的信息,如植被分类、植被储量、土壤变化等。其次,衍生数据可用于监测森林生长,风暴或火灾造成的损害等。
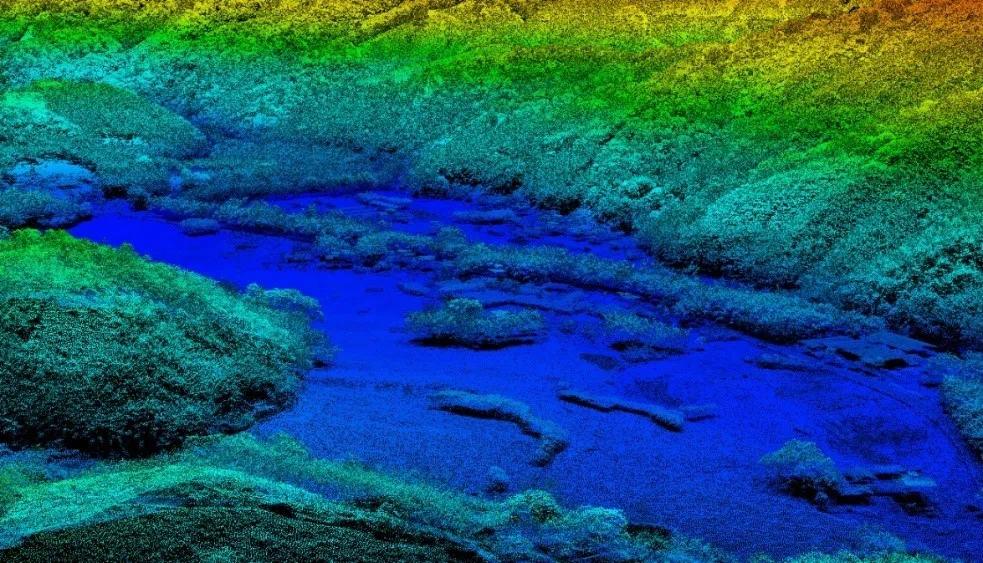
▲林木整体分布展示
4
可用于土方计算
高精度激光点云,可用于构建地形三维模型,为勘察设计提供断面量测、坡度坡向量测、土方填挖量等信息,大大减少工程勘察设计中的外业工作量,缩短工作周期。
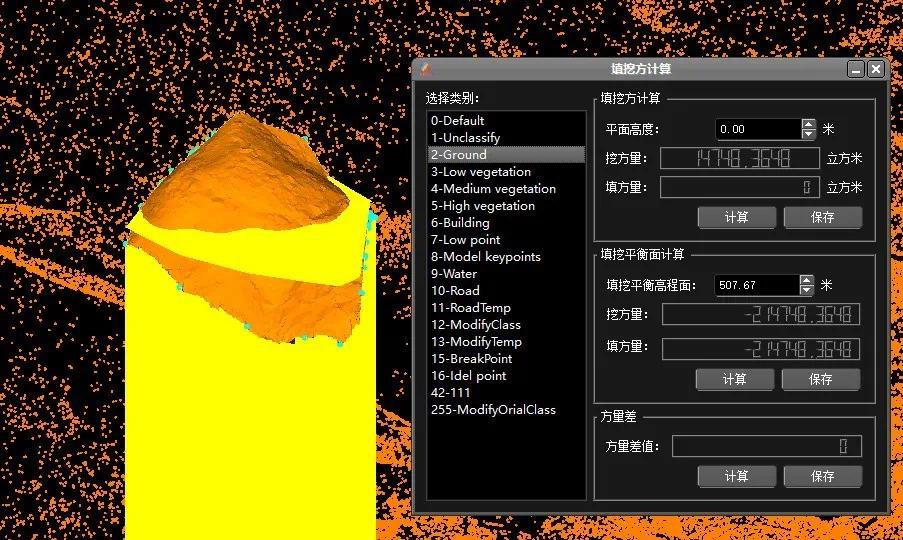
▲点云计算土方量
5
可用于监测地质灾害
通过地形三维模型的建立,可以大面积监测地形的变化,可以根据地形的变化方向及地形的变化量,作出风险评估,为预防地质灾害的发生提供依据。例如,对滑坡体地表的监测,特别是在陡坡下的道路、铁轨,以及削坡建房等容易发生滑坡地区,能够为滑坡体成因和发育趋势的推断提供重要依据。
▲削坡建房
全天候工作,主动获取数据;
隐蔽性好,抗有源干扰能力强,且获取数据范围广;
激光穿透能力强;
外业工作量小;
点云精度高,空间坐标信息准确。
应用案例
当前位置:
首页>
应用案例
关注我们


微信公众号