

什么是点云?
发布日期:2020-11-05
阅读量:8561
收藏:
1. 何为点云?
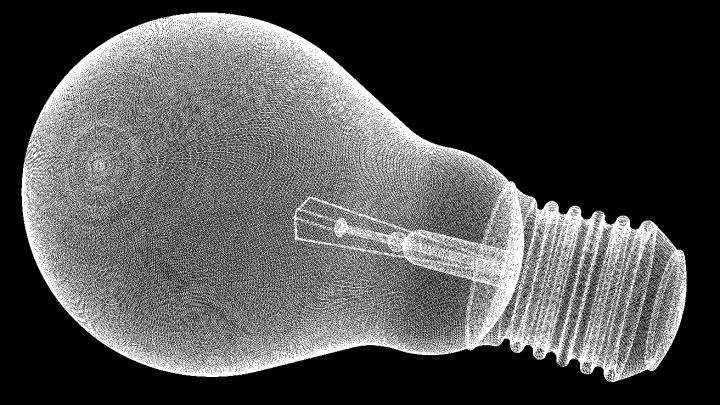
点云是某个坐标系下的点的数据集。
点包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等等,不一一列举。
在我看来点云可以将现实世界原子化,通过高精度的点云数据可以还原现实世界。
万物皆点云。
2.从何而来?
主要是通过三维激光扫描仪进行数据采集获取点云数据,其次通过二维影像进行三维重建,在重建过程中获取点云数据,另外还有一些,通过三维模型来计算获取点云。
2.1 三维激光扫描
这里不得不提LiDAR(Light Detection And Ranging)中文翻译激光探测与测量,LiDAR获取的数据就是点云数据,同时也对点云数据进行处理加工以及应用。
LiDAR获取数据的方式主要分为三大类:星载、机载和地面。
星载LiDAR采用卫星平台,运行轨道高、观测视野广,基本可以测量到地球的每一个角落,为三维控制点和数字高程模型的获取提供了新的途径,有些星载激光雷达还具有观察整个天体的能力。[1]
机载主要借助无人机(UAV/UAS)进行大规模的点云数据采集。

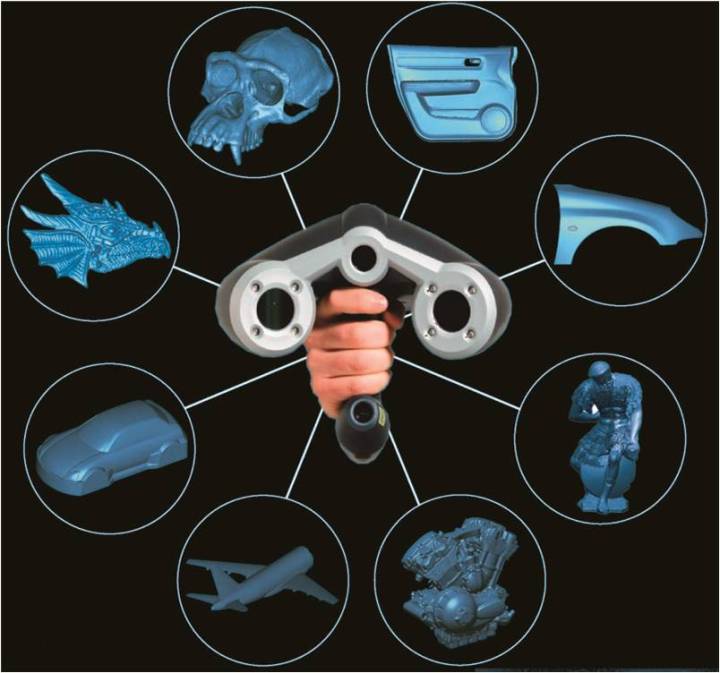
地面分为三小种:地上三维激光扫描;车载MMS;手持激光扫描。


车载MMS
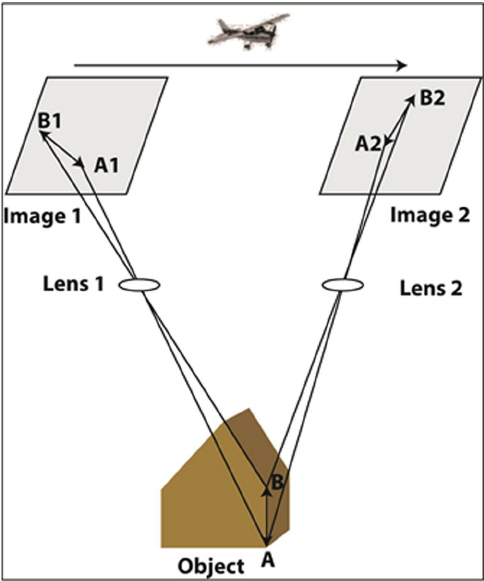
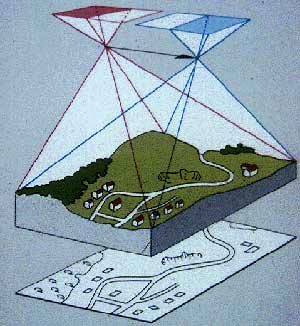
2.2 二维影像三维重建。
常见的摄影测量就是将二维影像通过一系列计算可以获取高精度的三维模型,在这一过程中我们同样可以获取点云数据。
2.3 三维模型逆向点云
之所以叫逆向点云,就是本来三维模型通过行、列扫描的形式同样可以获取到三维点云数据。
3. 点云有什么用?
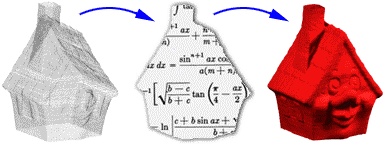
3.1 三维重建
高精度三维点云数据通过算法拟合生成曲面,用于三维建模,精度高,细节更精细,同时,建模速度快。
3.2 行业应用
3.2.1 测绘
LiDAR的出现成为了一种新型获取测量数据的方式,据有着高精度,快速等特点。
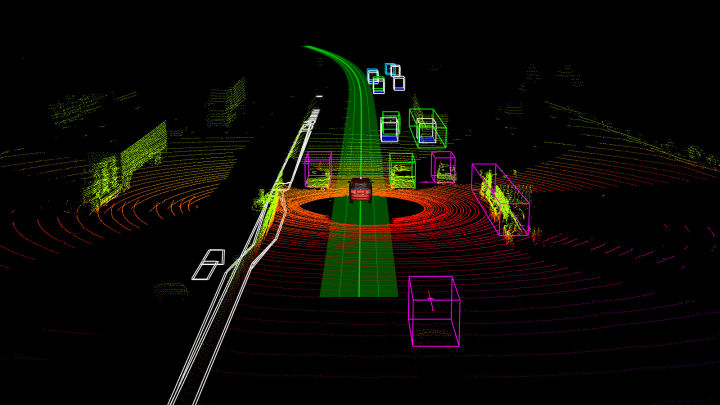
3.2.2 自动驾驶
LiDAR及点云数据已经在逐渐应用于高等级自动驾驶。
3.2.3 农业
点云数据的分类,对农业有着很好的参考价值
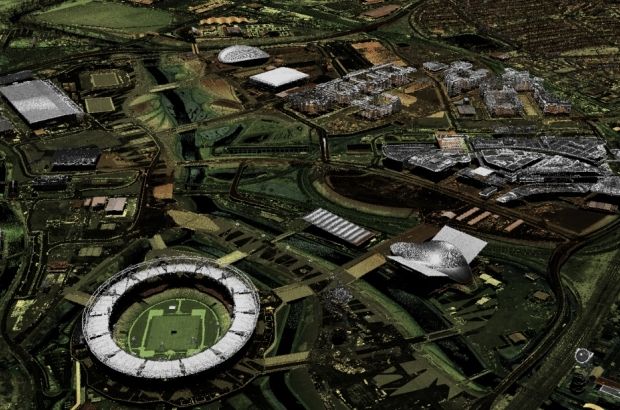
3.2.4 规划设计
大规模的点云数据,是规划设计的利器,高精度实时快速的三维场景,更能直观的展示设计。
3.2.5 考古与文物保护
高精度的点云数据早已应用在文物保护行业。
3.2.6 医疗
应用案例
当前位置:
首页>
应用案例
关注我们


微信公众号