

导线测量技术:附和导线平差计算详细教程
发布日期:2020-12-22
阅读量:15612
收藏:
为促进大家更全面更深刻学习了解测绘方面知识,本期推出附和导线平差计算详细教程,供大家参考学习;平差有两种方式,一是手动平差,二是软件平差。本文讲解手动平差,这个过程能让测量员们掌握平差的原理,和相关的基础知识。

第1步,制作平差计算表并填入已知数据
在Excel中按适当格式制作一个《附和导线平差计算表》(表格我已经做好了,需要的可以给我发私信),然后按要求输入起始边和附和边的起、终点坐标并计算方位角和边长。再参照观测记录表在”测点“栏中依次填入各个测点,在”观测左角值”栏中填入每个测站测得的平均角值,在“距离”栏中填入各导线边的平均边长。填入后的效果如下图:
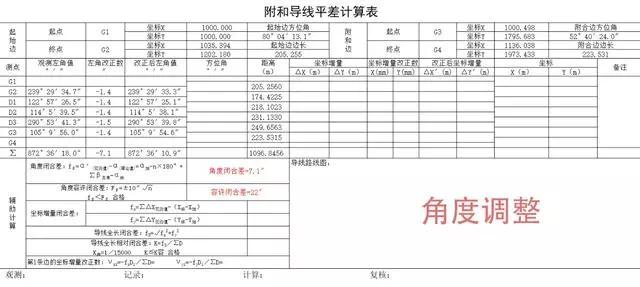
注:已知边的方位角和边长的计算方式很多,比如用5800计算器的Pol函数,道路之星的测站、CASS查询等。
第2步,计算角度闭合差
计算角度闭合差,是为了检验外业角度观测的精度是否满足相应等级导线的技术要求。如果实测的角度闭合差<容许角度闭合差,则外业角度观测合格,可以进行平差;反之外业不合格需要重新观测。
相关计算公式:
实测角度闭合差=实测附和边方位角-理论附和边方位角
实测附和边方位角=起始边方位角-N*180+实测左角值之和
容许角度闭合差各等级导线有相应规定(各等级导线的技术要求在上篇文章中)。
注:N为测量站数,方位角取值范围是0度(含)到360度(不含),大于360度的减去360度,小于0度的加上360度。
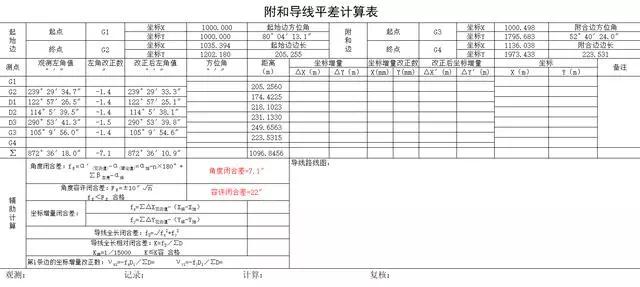
本案例经计算:角度闭合差=7.1秒,容许闭合差=22秒,观测精度合格。
第3步,计算左角改正数
经过角度闭合差的计算,确定外业成果合格后,就要计算左角改正数。
左角改正数=角度闭合差的相反数/测站个数
改正后左角值=观测左角值+左角改正数
本案例角度闭合差=7.1秒,那么左角改正数=-7.1/5=-1.42秒。
分配说明:为尽量平均分配误差,我们可将改正数保留1位小数,所以案例中每个测站分配-1.4秒,这时还有0.1秒未得到分配。这时我们可以将这0.1秒强制进行随机分配。这样5个测站中,4个测站的改正数为-1.4秒,1个测站的改正数为-1.5秒,闭合差刚好分配完。改正数计算完成后填入“左角改正数”栏中,然后计算改正后左角值并填入“改正后左角值”栏中,这时我们的表格如下图:
第4步,推算各导线边的方位角
以起始边的方位角数据起算,依次逐边推算出每条导线边的方位角。公式:
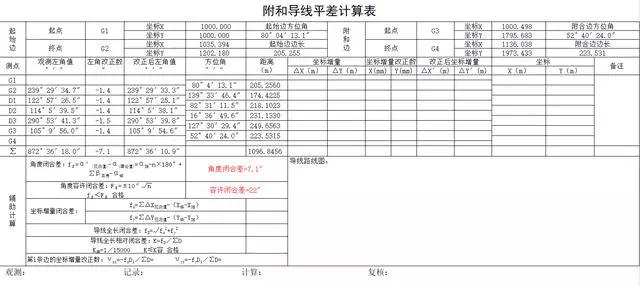
导线边的方位角=前一条边的方位角+180度+该测站的改正后左角值
如本案例中,G2-D1边的方位角=G1-G2边的方位角+180+G2测站的改正后左角值。这样依次类推,就能计算出每条边的方位角,计算后在“方位角”栏中对应位置埴入结果,如下图所示:
第5步,计算坐标增量闭合差
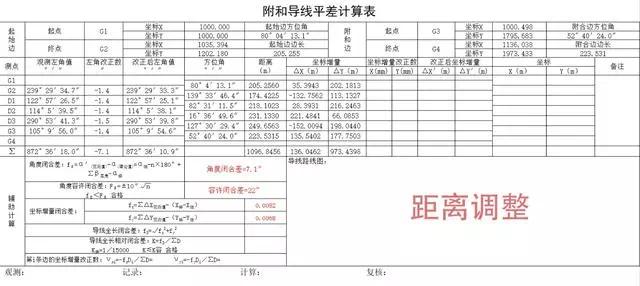
计算坐标增量闭合差之前要先计算坐标增量,并填入相应位置,然后将X坐标增量和Y坐标增量分别求和。计算公式是:
X坐标增量=距离(即边长)*COS(方位角)
Y坐标增量=距离(即边长)*SIN(方位角)
这一步骤完成后,表格内容如下图所示:
第6步,计算坐标增量闭合差
X坐标增量闭合差=X坐标增量之和-(附和边终点X坐标-起始边起点X坐标)
Y坐标增量闭合差=Y坐标增量之和-(附和边终点Y坐标-起始边起点Y坐标)
本案例中:
X坐标增量闭合差=X坐标增量之和-(G4点X坐标-G1点X坐标)
Y坐标增量闭合差=Y坐标增量之和-(G4点Y坐标-G1点Y坐标)
第7步,计算导线全长闭合差和导线全长相对闭合差
计算导线全长相对闭合差是为了验证外业距离测量的精度是否满足技术要求,计算公式:
导线全长闭合差=根号下(X坐标增量闭合差的平方+Y坐标增量闭合差的平方)
导线全长相对闭合差=导线全长闭合差/导线全长(即边长之和)
导线全长相对闭合差的容许值各级导线有相应规定,如果计算出的导线全长相对闭合差<容许值,则外业距离测量精度合格,可继续平差计算;反之为不合格需要重新测量。
经计算,本案例中导线全长相对闭合差=1/102950,小于容许值1/15000,所以外业测距合格。导线全长相对闭合差中,分母越大说明观测精度越高。
第8步,计算各导线边的坐标增量改正数和改正后的坐标增量
坐标增量改正数跟前面的左角改正数类似。将坐标增量闭合差反号后按各导线的实测边长成正比分配。计算公式:
某导线边的X坐标增量改正数=X坐标增量闭合差的相反数*(该边的实测边长/导线总长)
某导线边的Y坐标增量改正数=Y坐标增量闭合差的相反数*(该边的实测边长/导线总长)
改正后坐标增量=坐标增量+坐标增量改正数
第9步,计算各个控制点的坐标
以起始边的起点坐标为基准,计算公式:
X坐标=前一点的X坐标+该测站的改正后坐标增量
Y坐标=前一点的Y坐标+该测站的改正后坐标增量
按公式依次计算并输入相应的位置,整个平差过程就结束了,各控制点平差后的坐标就出来了。如下图:

应用案例
当前位置:
首页>
应用案例
关注我们


微信公众号